Sensitive robot hand with artifical intelligence
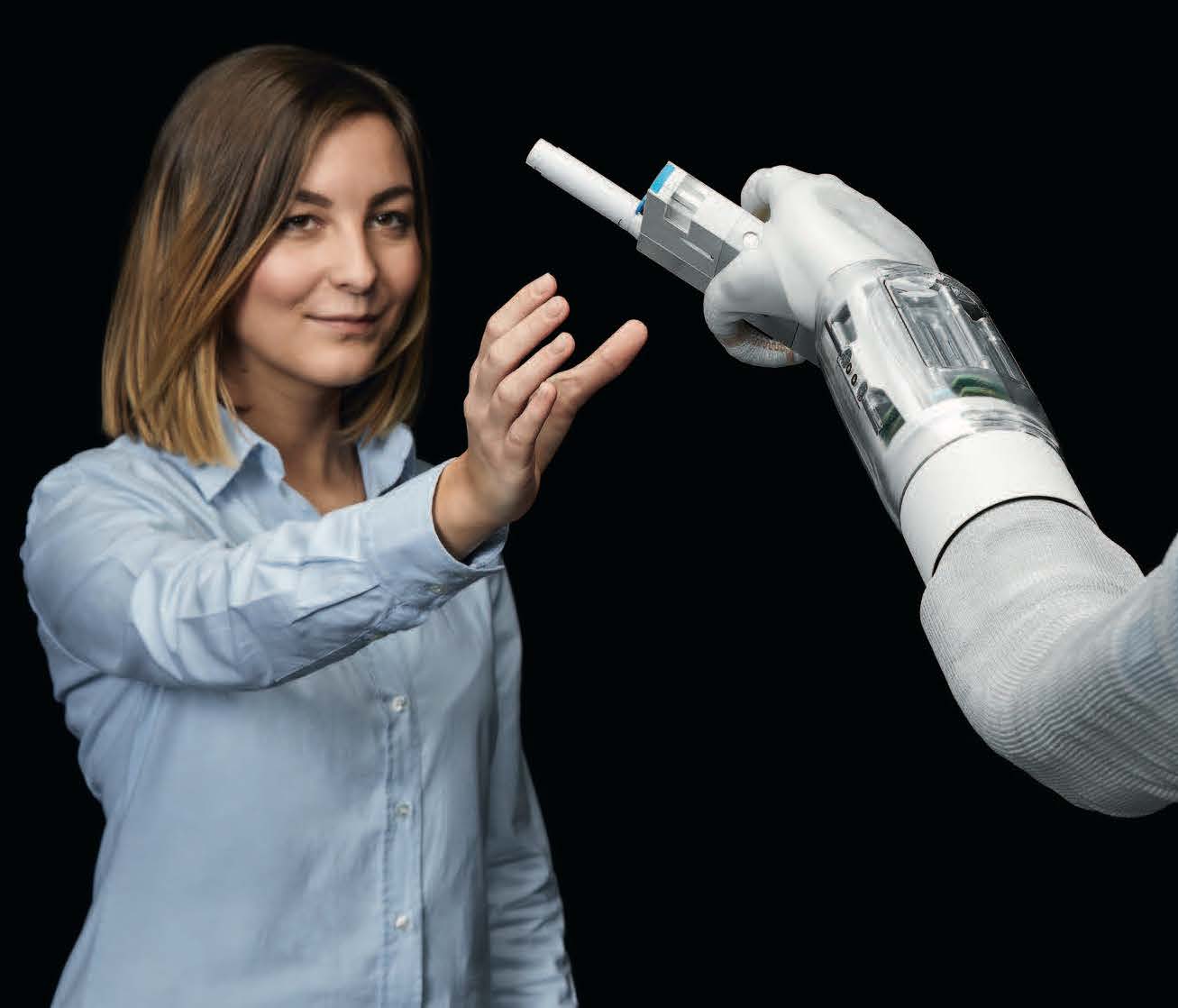
Whether grasping, holding or turning, touching, typing or pressing – in everyday life, we use our hands for the most diverse tasks. The human hand is a true miracle of nature. What could be more logical than equipping robots in collaborative working spaces with a gripper that is based on this natural model and can learn through artificial intelligence to solve a wide variety of gripping and turning tasks?
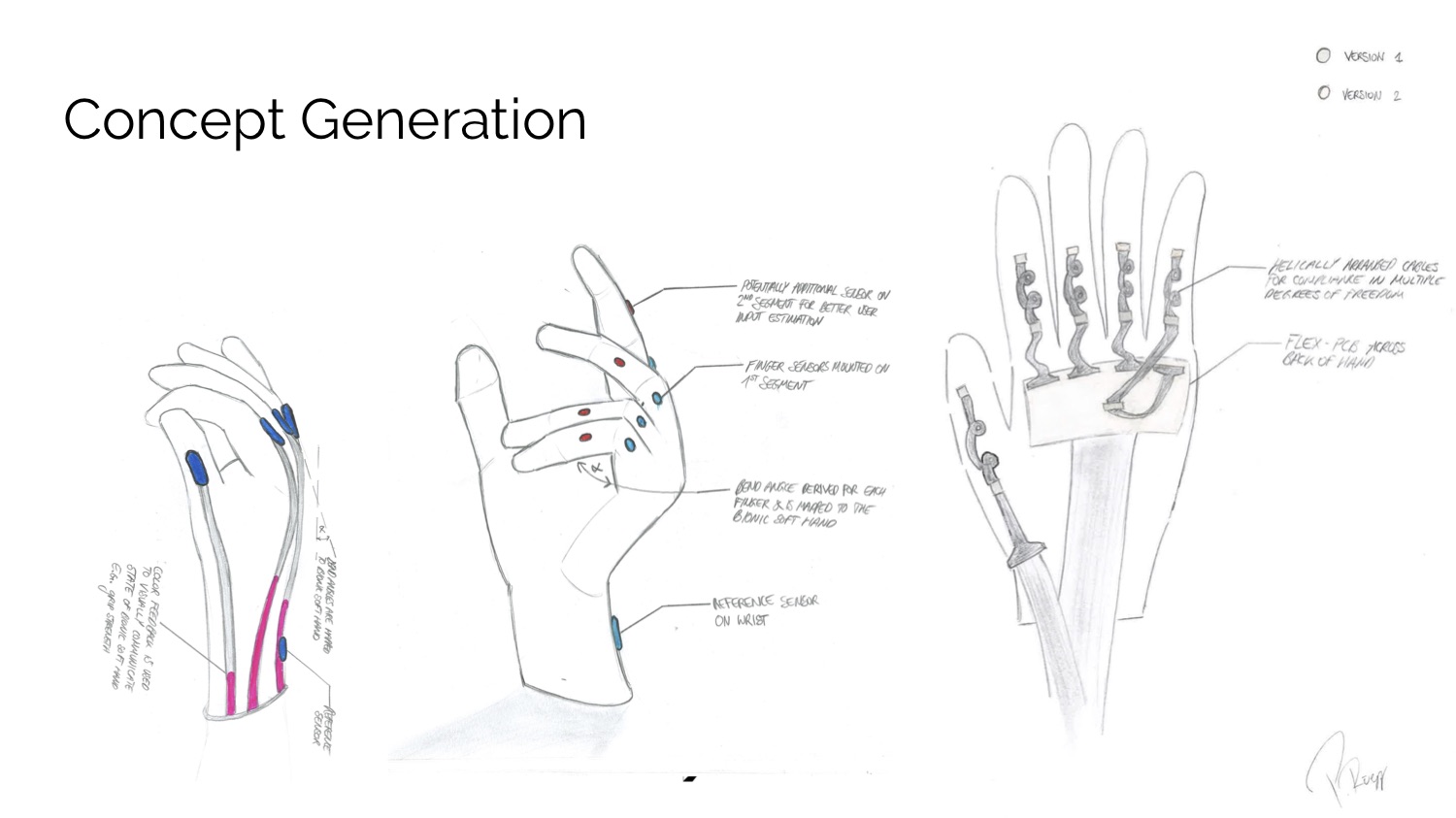
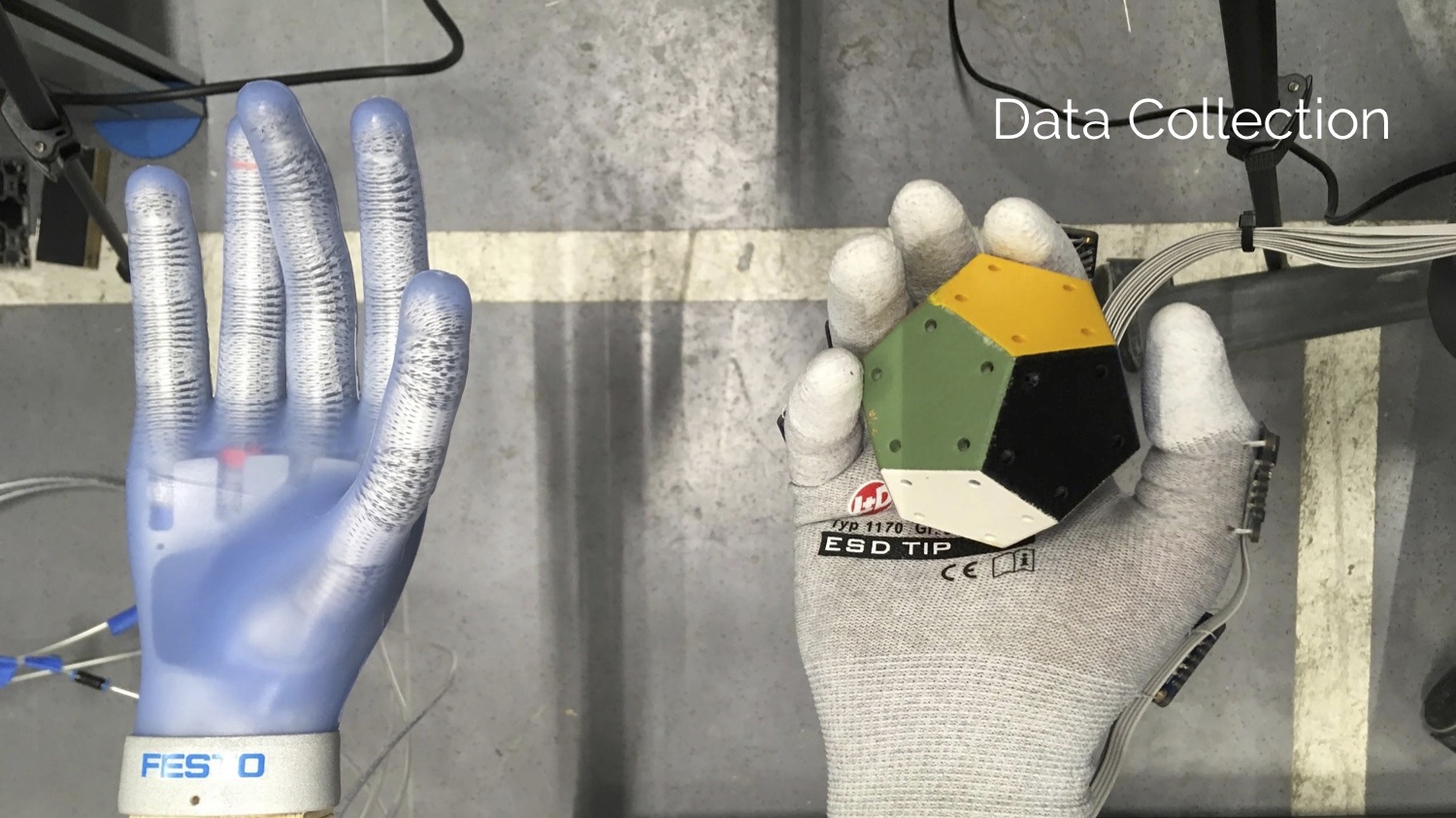
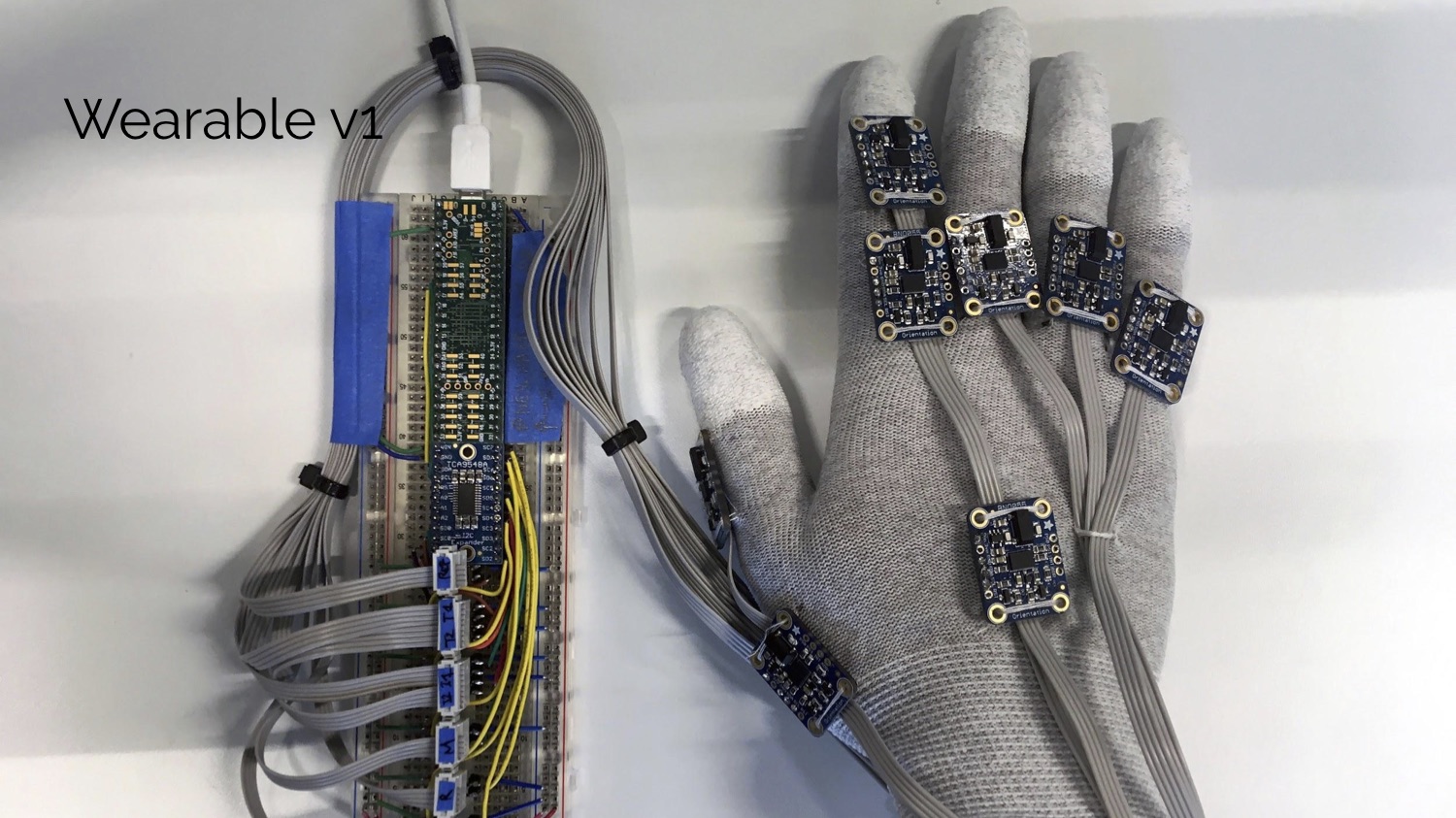
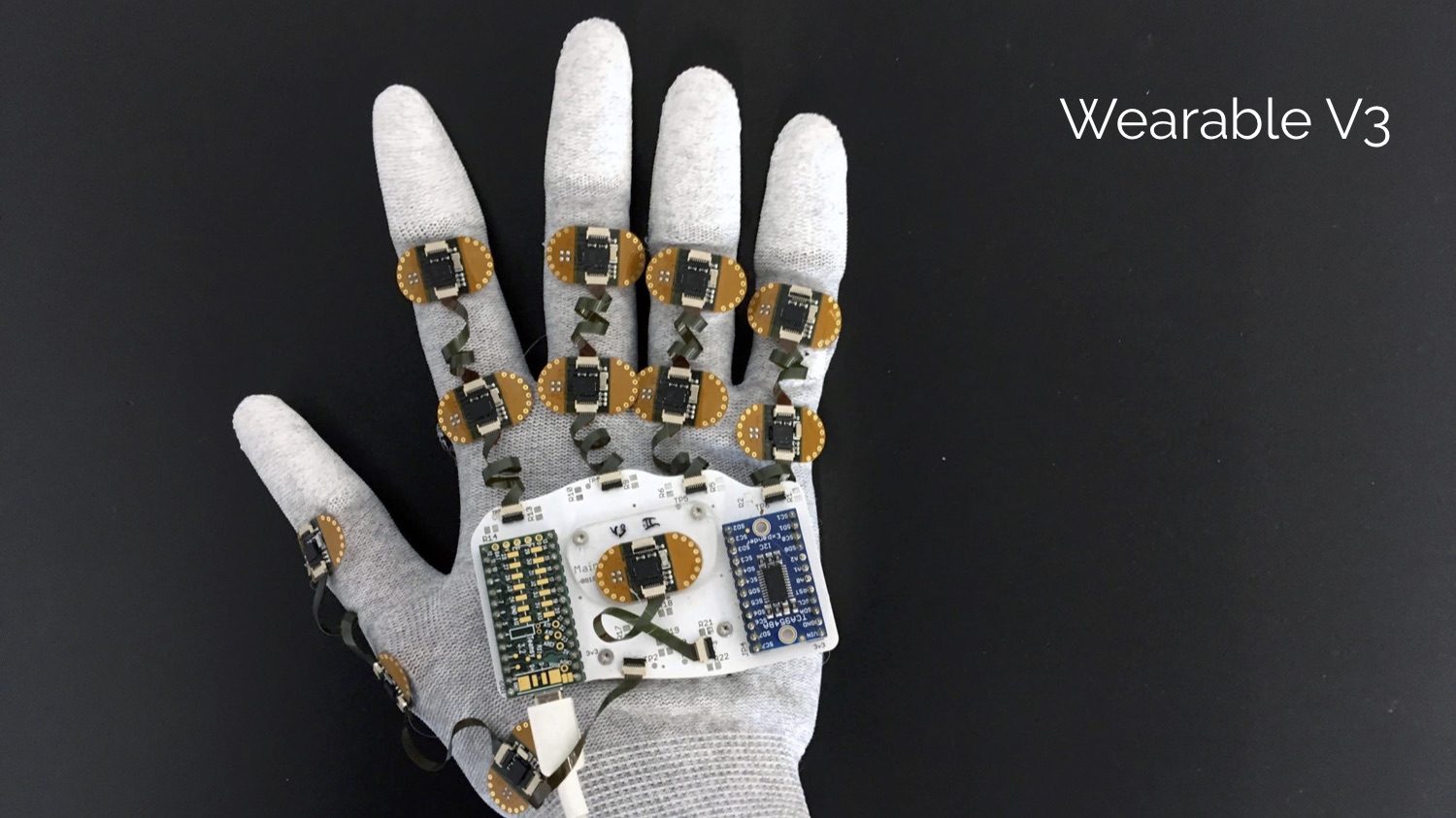
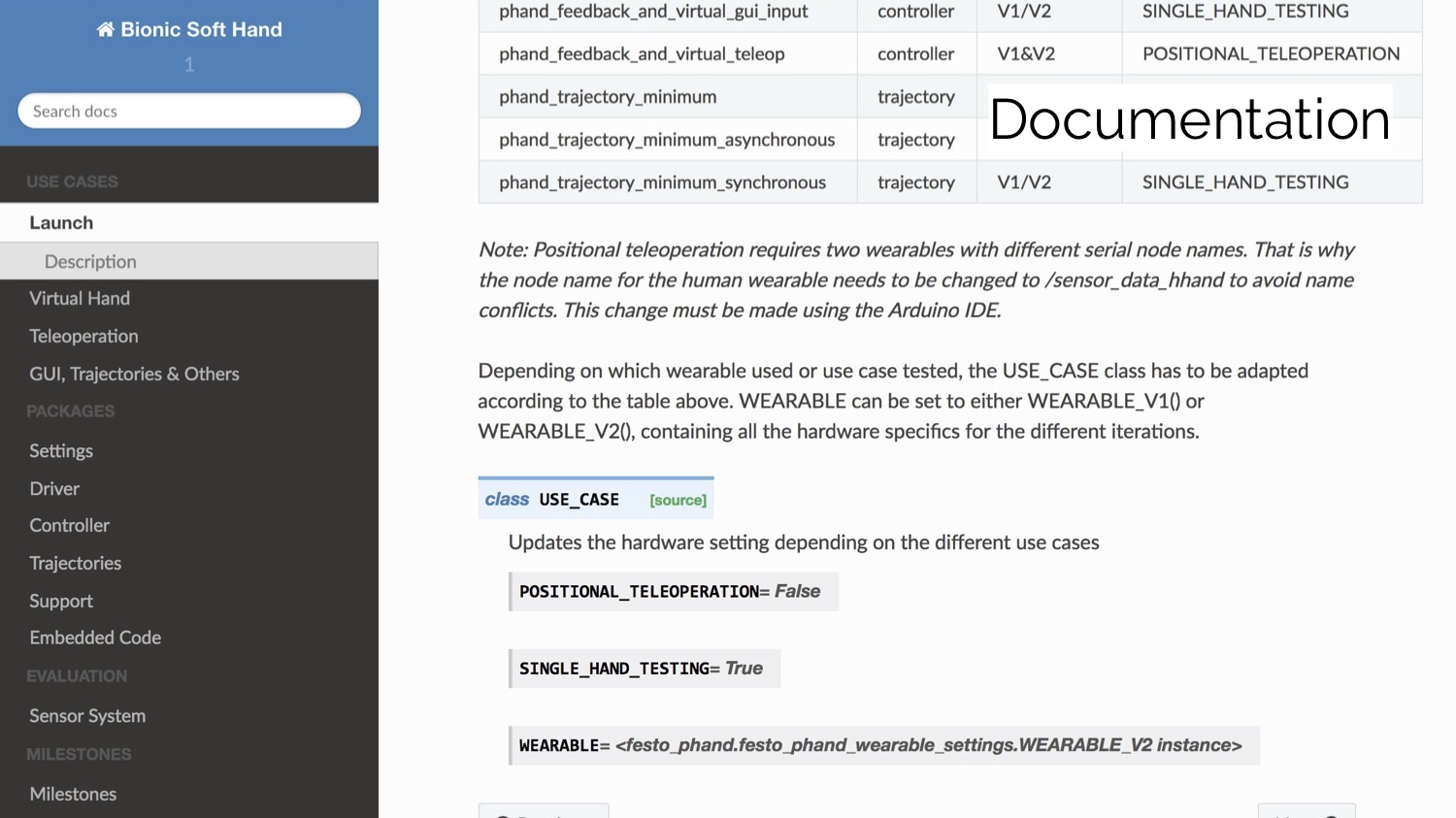
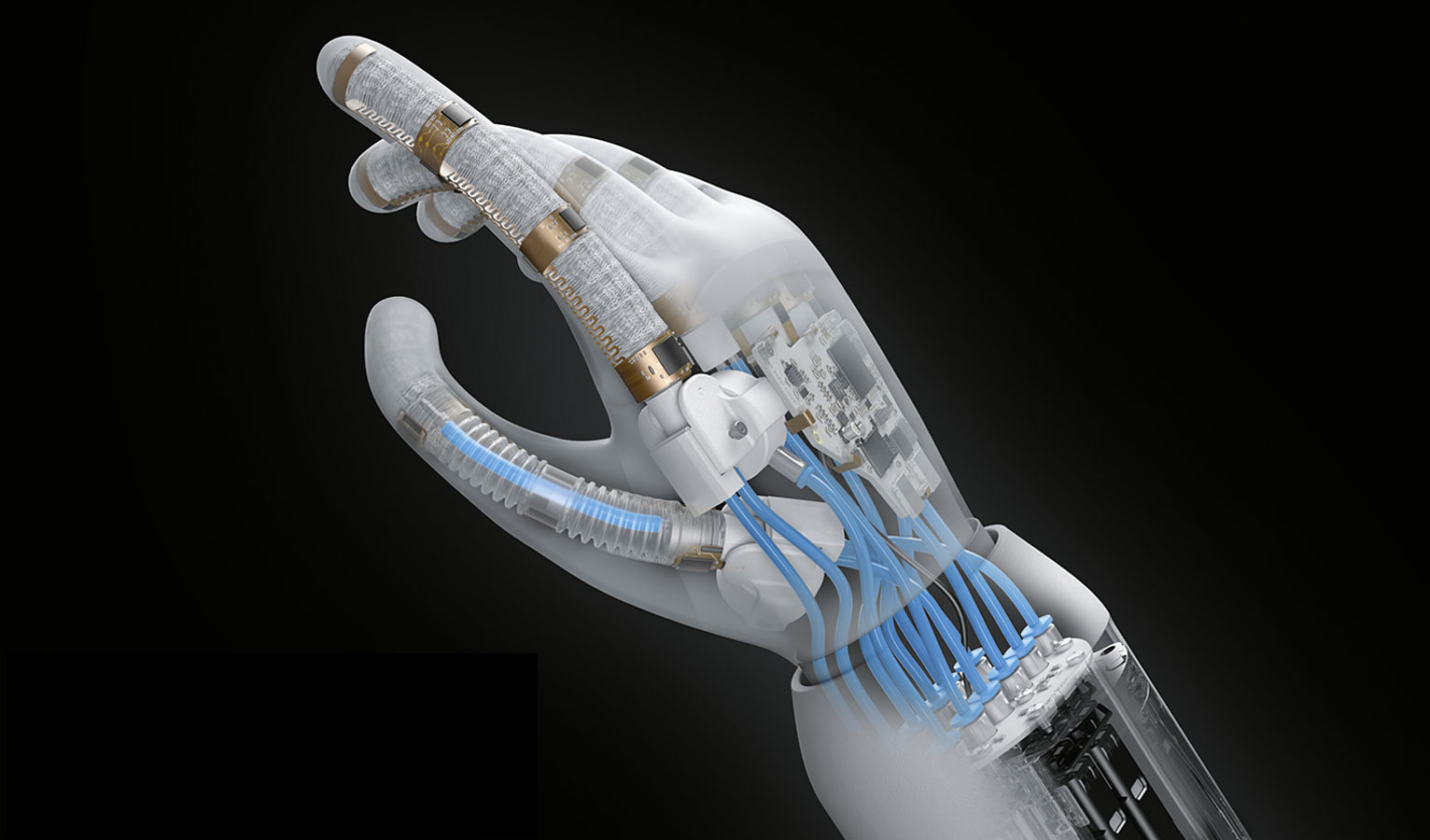
Bionic Soft Hand was the main project I was involved in at FESTO Bionics. My focus was developing a sensing system for the soft robotic hand in order to build advanced interactions such as teleoperation. I conceptualised and developed three iterations of wearable sensor gloves that could determine the current pose of the hand. My early-stage prototypes were later miniaturised and incorporated into the hand. Meanwhile, I was able to use the sensor glove to prototype physical interactions with the robotic hand based on human input i.e. hand movements.

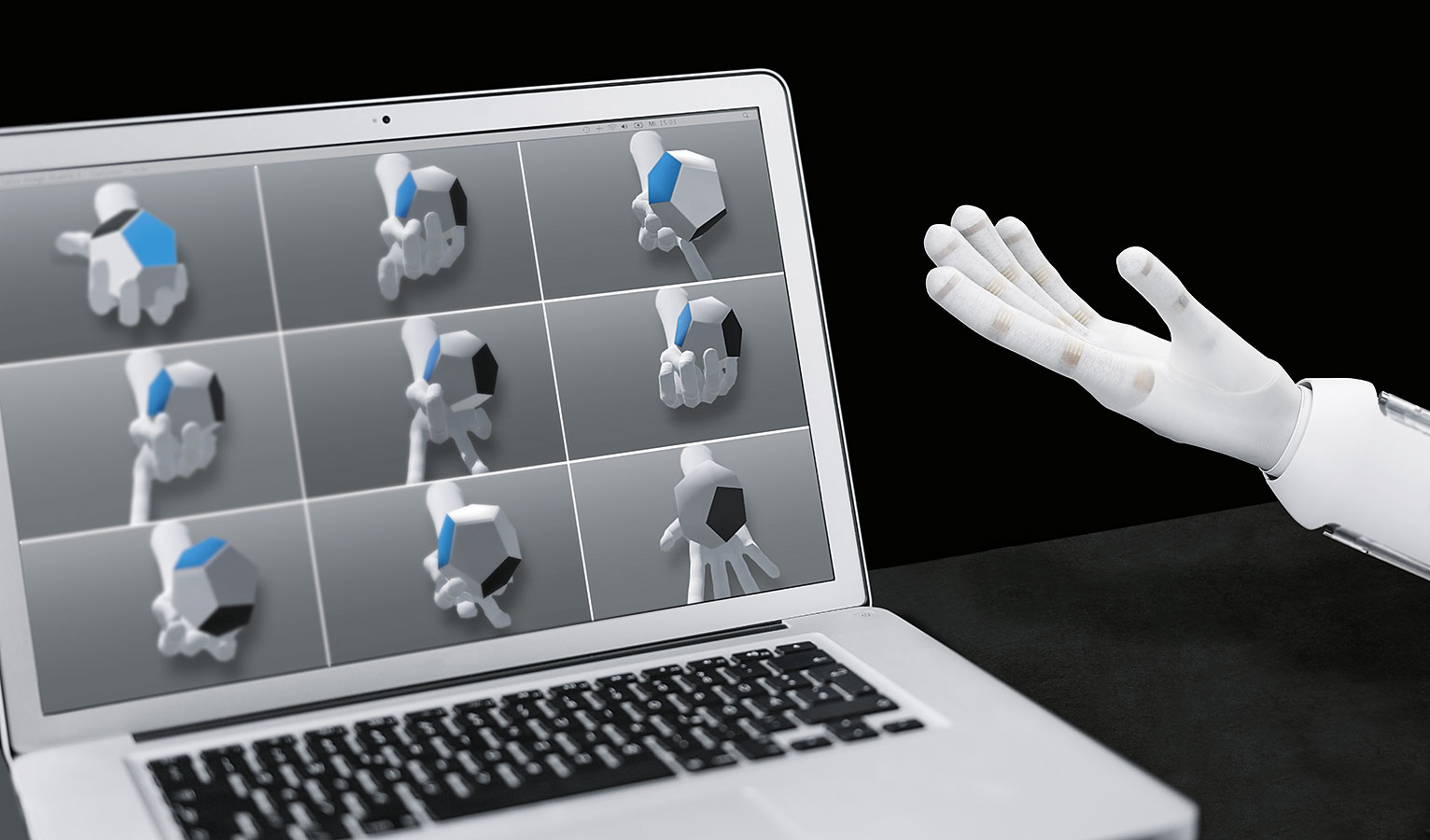
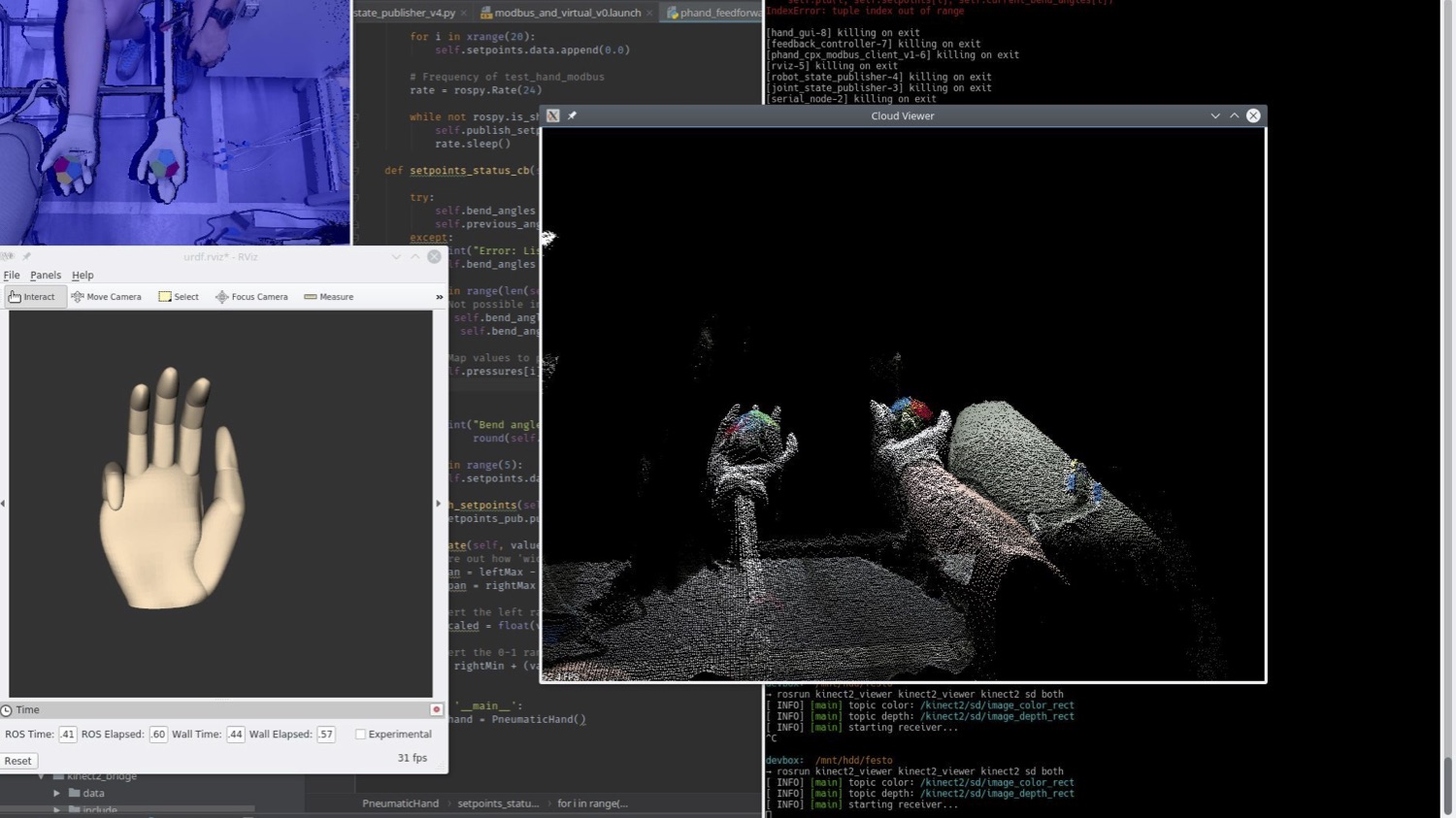
Using the data from the sensor glove I designed, I implemented a digital twin of the physical hand (visualisation) wearing the glove as well as PID position control and teleoperation of the Bionic Soft Hand. The robot hand was running on ROS, so the bulk of the code was written in Python and C++. Unfortunately, I had to return return to university before the project was completed, but left the team with a thorough documentation of my work and code. Other things I contributed to included: