A pull-out desk that works in constrained spaces
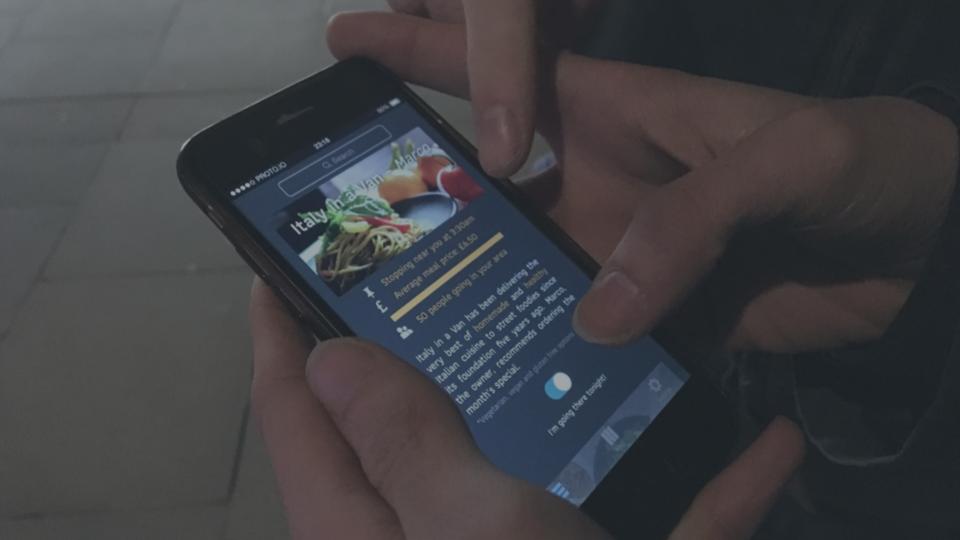
A vending machine based on trust – with freshly prepared, locally sourced food
A VR documentary highlighting the Kusunda language
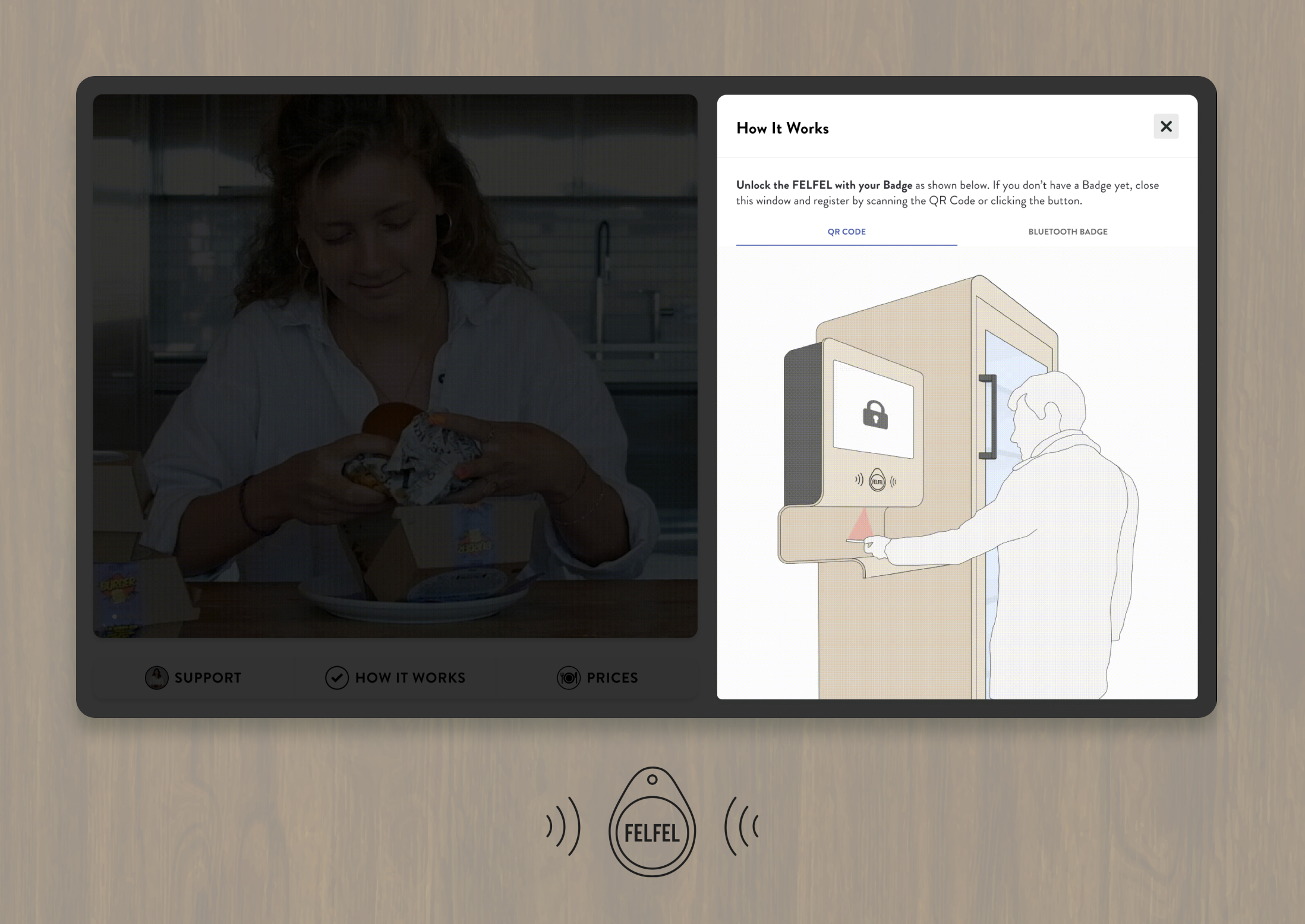
Redesign of a point-of-sale device interface for FELFEL
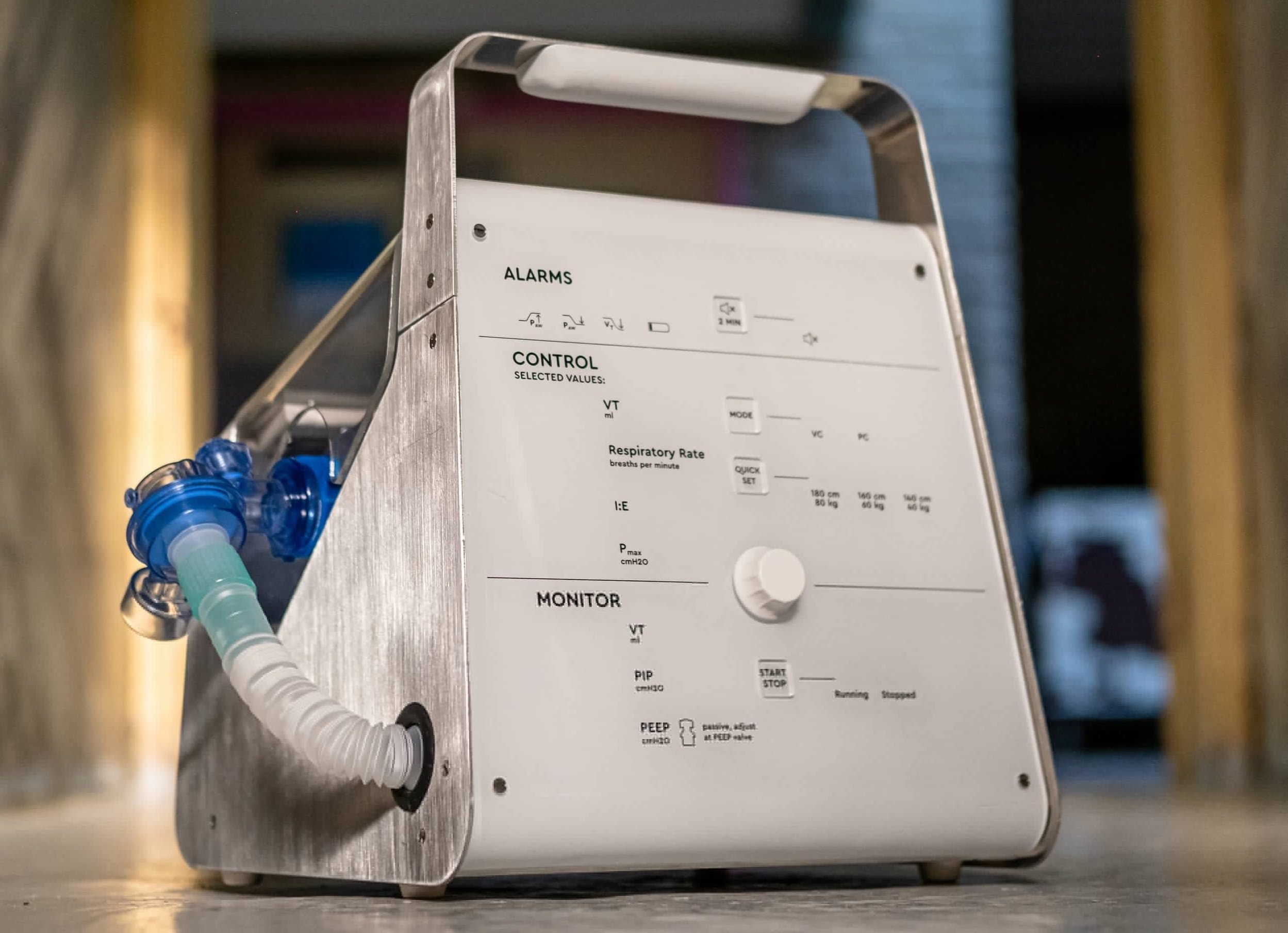
A ventilator for low-resource settings
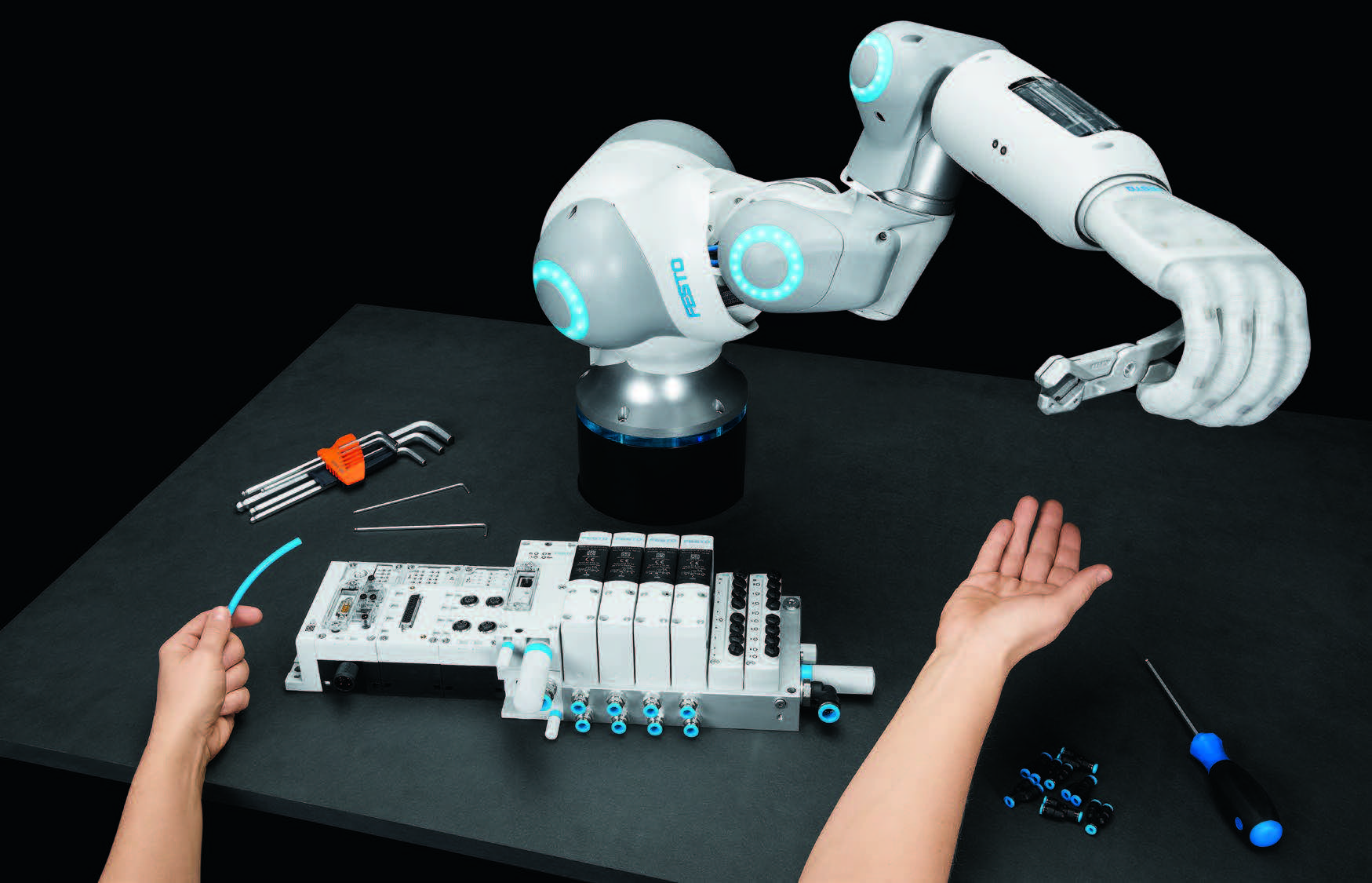
Sensitive robot hand with artifical intelligence
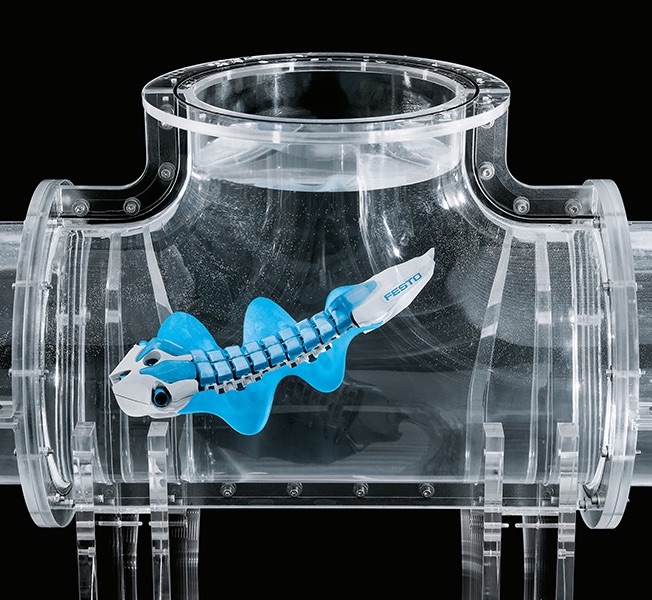
Underwater robot with unique fin drive
AI-assisted cervical cancer diagnosis via a smartphone-enabled device
A VR documentary on human-animal conflict in North India
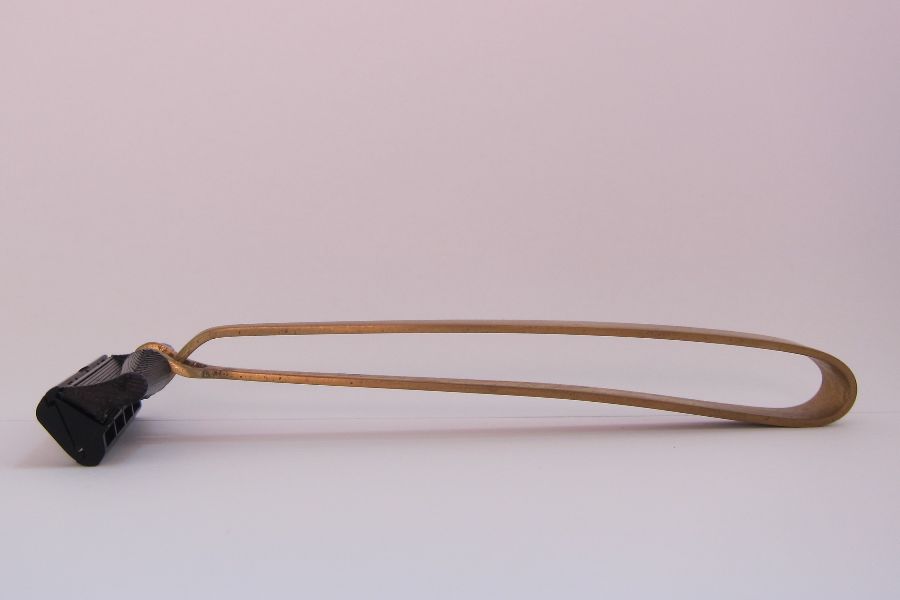
A minimal razor designed for sustainability
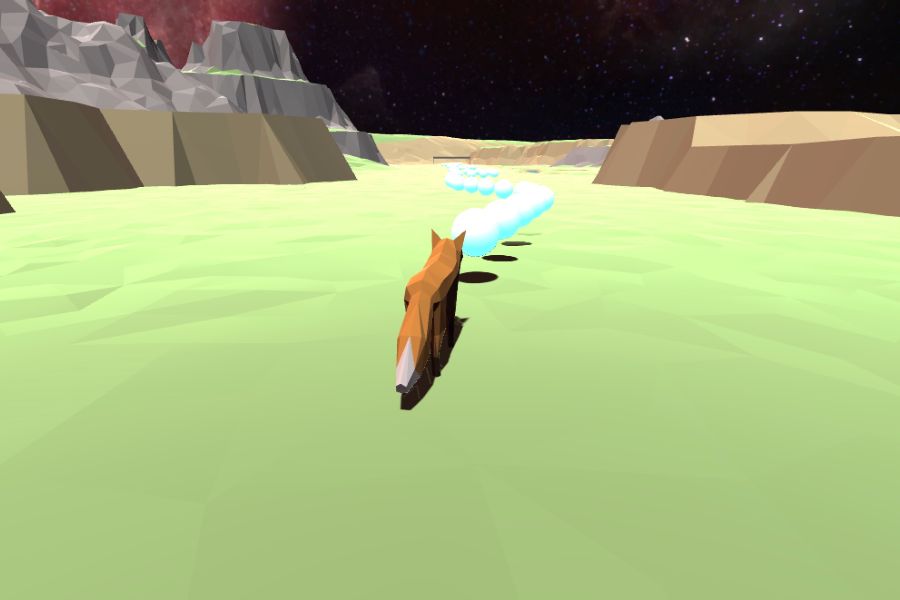
Low-cost posture rehabilitation game for CP patients using ubiquitous smartphone sensors
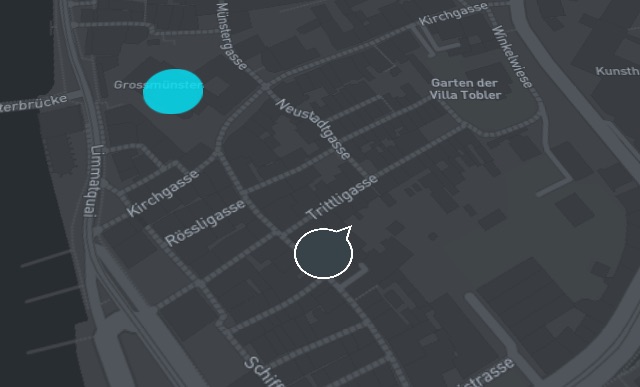
Rethinking urban navigation using spatial audio
Investigating how deaths on the railway could be reduced using VR
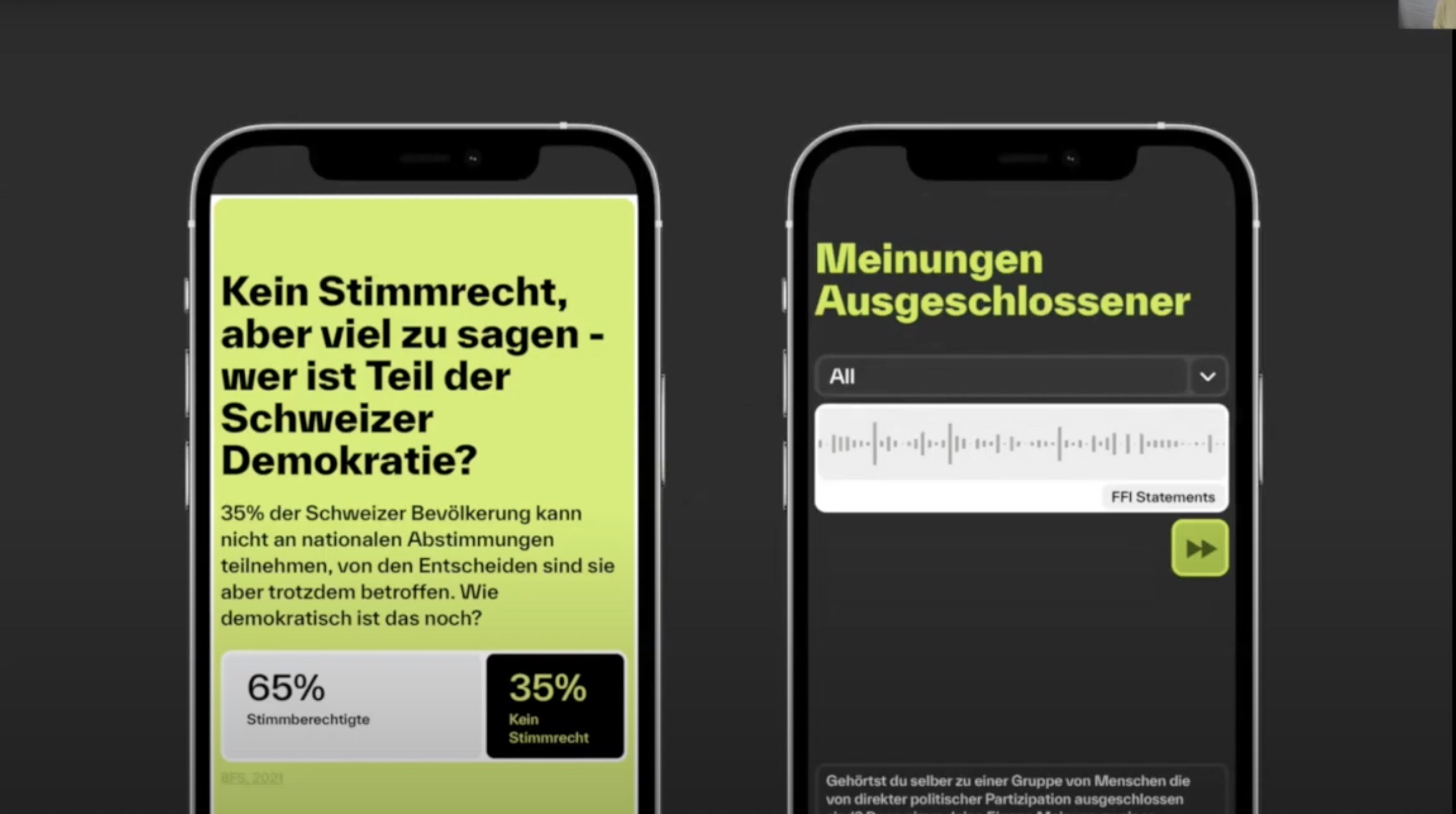
Giving a voice to the underrepresented
Future interfaces between robots, humans and their environments
Ensuring night workers have access to fresh and healthy food
Building the Mirror World
Turning motion into musical expression
Exploring digital ways of collaboration in response to COVID-19
Digital 3D creation for designers, artists, and makers alike
A robot arm that beats every chess master